









-
High-precision offline programming and trajectory verification
Based on the 3D CAD model of the workpiece, the motion trajectories of the robot for tasks such as welding, gluing, and laser processing are generated directly in the simulation software, eliminating the time wasted by traditional teaching and the occupation of the production line. The trajectory positioning accuracy can reach ±0.1mm.
-
Complex Motion Optimization and Timing Analysis
The generated trajectory is analyzed for smoothness, reachability, and singularity. Critical path points are automatically optimized, unnecessary axis movements are eliminated, and idle time is shortened, thereby reducing the overall processing cycle and improving the equipment's OEE (Overall Equipment Efficiency).
-
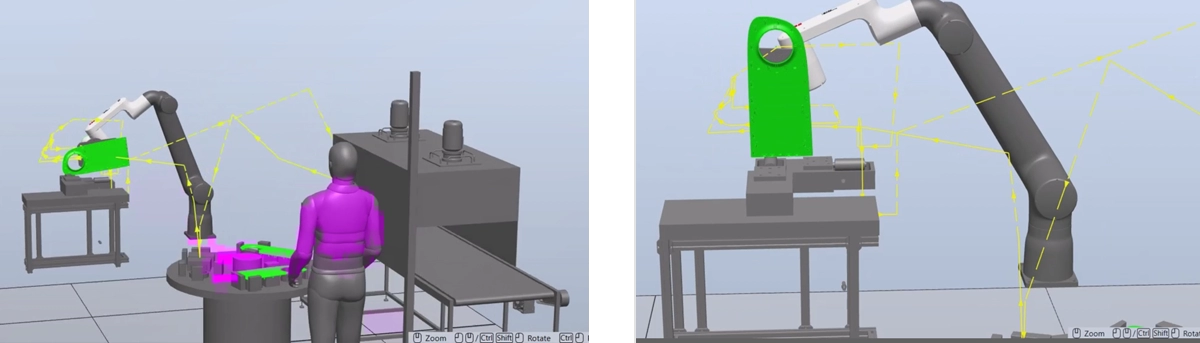
Tooling and environmental collision detection
By constructing a complete model of tooling fixtures, peripheral equipment, and safety fences in a virtual environment, static and dynamic interference checks with millimeter-level precision are performed on the robot's entire movement process. This allows for early warning and resolution of potential collision risks, ensuring equipment safety.

